Рис. 23. Формирование сигнала ошибки слежения в зависимости от положения пятна
Рис. 24. Чувствительность фоторезисторов основного и вспомогательного каналов
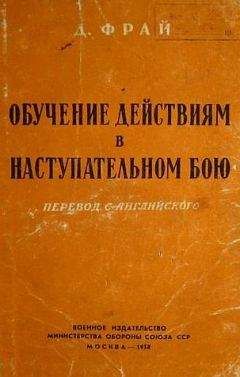
Рис. 25. Устройство фоторезистора основного канала
2. Фоторезистор — полупроводник, обладающий свойством фотопроводимости, т. е. способностью генерировать электронно-дырочные пары при поглощении тепловых фотонов. Спектральная чувствительность фоторезистора определяется материалом и температурой полупроводника.
В качестве фоторезистора основного канала используется монокристалл антимонида индия, охлажденный до температуры 77 К (–196 °C) для повышения спектральной чувствительности в области 5 мкм.
Система охлаждения фоторезистора основного канала работает по принципу дросселирования сжатого газообразного азота до перехода его в жидкую фазу с tкип=–196 °C. В качестве источника азота, сжатого до 350 атм, используется баллон наземного источника питания. При нахождении ракеты в пусковой трубе баллон газопроводом соединяется с микрохолодильником «брызгающего» типа.
Жидкий азот с выхода микрохолодильника омывает основание фоторезистора и пропитывает набивку накопителя жидкого азота, обеспечивая требуемую температуру фоторезистора в течение заданного времени.
Под действием тепловых импульсов цели в рабочей цепи фоторезистора будет протекать импульсный ток, т. е. произойдет детектирование модулированного теплового потока — преобразование ошибки слежения в синхронный электрический сигнал.
Рис. 26. Получение импульсов тока в цепи фоторезистора
Во вспомогательном канале используется неохлажденный фоторезистор на основе сернистого свинца, чувствительный к излучению ложных тепловых целей с максимумом 2–3 мкм.
3. Предварительный усилитель представляет собой широкополосный усилитель низкой частоты, позволяющий:
• усилить информационный сигнал до уровня надёжной работы последующих устройств;
• преобразовать сигнал ошибки слежения из импульсной формы (видеосигнал постоянного тока с бесконечным спектром частот) в сигнал переменного тока со значительно сокращенным диапазоном частот.
Выходной сигнал предварительно го усилителя имеет сложную форму и содержит в себе множество гармонических колебаний, в том числе и первую гармонику частоты сканирования, которая в дальнейшем используется в качестве информационного сигнала об ошибке слежения за целью.
Для выделения первой гармоники и применяют последовательное сокращение диапазона частот сигнала ошибки слежения с помощью предварительного усилителя, избирательного усилителя, амплитудного детектора, усилителя коррекции СКЦ.
Рис. 27. Спектральное преобразование сигнала ошибки слежения
4. Схема автоматической регулировки усиления представляет собой отрицательную обратную связь, изменяющую коэффициент усиления предварительных усилителей и тем самым стабилизирующую параметры сигнала ошибки при изменении мощности принимаемого излучения.
Таким образом, тепловое излучение цели и помех, сфокусированное объективом, проецируется в виде пятен малого размера на диски модуляторов соответственно основного и вспомогательного каналов фотоприёмника.
Благодаря тому, что диски модуляторов размещены в фокальных плоскостях объектива и ось их вращения совпадает с его оптической осью, положение пятна на диске однозначно характеризует угловое рассогласование между линией визирования и оптической осью объектива, т. е. ошибку слежения координатора. Благодаря вращению и специальной форме прозрачного окна дисков происходит круговое сканирование положения цели (и ЛТЦ) в пределах поля зрения ОГС и преобразование информации об ошибке слежения из пространственного вида в импульсную модуляцию теплового потока.
Охлаждаемый фоторезистор основного канала преобразует модулированный тепловой поток цели в синхронный импульсный электрический сигнал постоянного тока. Причем в длительности импульса содержится информация о величине, а во временном положении импульса в периоде сканирования — о направлении ошибки слежения за целью.
Предварительный усилитель преобразует сигнал постоянного тока в цепи фоторезистора в сигнал переменного тока, содержащий в себе первую гармонику частоты сканирования. Амплитуда сигнала частоты сканирования несёт информацию о величине, а фаза — о направлении ошибки слежения.
Охлаждение фоторезистора до температуры –196 °C позволяет не только задать спектральный диапазон излучения поражаемых целей, но и значительно повысить чувствительность фотоприёмника на фоне тепловых помех. Охлаждающее устройство фоторезистора основного канала дросселирует сжатый до 350 атм азот, хранящийся в баллоне наземного источника питания. При понижении давления азот переходит в жидкое состояние с температурой –196 °C (77 К), охлаждает фоторезистор и накапливается в специальном корпусе с набивкой. Охлаждающее устройство обеспечивает достижение заданной температуры фоторезистора за 4,5 с перед пуском и подержание её в течение 14 с после пуска.
Неохлаждаемый фоторезистор вспомогательного канала чувствителен к тепловому излучению ложных тепловых целей (ЛТЦ) и аналогично преобразует его в электрический сигнал.
Повышению качества сигнала ошибки слежения, а в целом и наведения ракеты на цель способствует и автоматическая регулировка усиления, работающая по сигналу предварительного ПУок. Сигнал ошибки слежения за целью с выхода фотоприемника основного канала поступает на схему переключения и схему ближней зоны электронного блока ОГС. Сигнал ЛТЦ с выхода фотоприемника вспомогательного канала поступает на схему переключения.
Следящая система координатора цели
Следящая система предназначена для автоматического слежения координатора за целью и на основе этого определения угловой скорости линии визирования, необходимой для реализации метода пропорционального сближения при наведении ракеты в упрежденную точку встречи с целью.
Для этого следящая система решает следующие задачи:
1. Непрерывно автоматически совмещает оптическую ось координатора (ХК) с линией визирования цели (ХВ), т. е. сводит ошибку слежения координатора к нулю (Δε → 0).
Рис. 28. К работе следящей системы координатора цели
2. При Δε → 0 появляется возможность измерения угловой скорости виртуальной линии визирования (dεв/dt) как угловой скорости поворота самого координатора (dεк/dt), т. е. dεв/dt = dεк/dt.
3. При использовании гироскопического привода координатора угловая скорость его прецессии (поворота координатора) пропорциональна величине внешнего управляющего момента, а последний пропорционален ошибке слежения, т. е. dεв/dt ≈ Δε.
4. При реализации метода пропорционального сближения за параметр управления (ошибку наведения Δφ(t)) принимается dεв/dt, а система наведения ракеты на цель будет стремиться свести ошибку наведения к нулю путём изменения угла пеленга φ, т. е. Δε = φ(t) → 0.
5. В системе наведения ракеты на цель следящий координатор является датчиком ошибки наведения, а автопилот — следящим приводом. Поэтому в качестве управляющего сигнала для автопилота используется сигнал ошибки слежения координатора, т. е. UВХАП = Δε.
Структурно следящая система координатора построена по классической схеме, в которой с точки зрения автоматического управления:
1. Объектив одновременно выполняет роль датчика цели (положения линии визирования εв) и датчика отрицательной обратной связи (положения оптической оси координатора εк).
2. Фотоприёмник выполняет роль алгебраического сумматора, формирующего электрический сигнал рассогласования (ошибки слежения координатора Δε = εв — εк).
3. Электронный блок выполняет роль усилительно-преобразовательного тракта, формирующего электрические управляющие сигналы для исполнительного элемента следящей системы координатора (UΔε) и автопилота: Udεв/dt. Причем UΔε = U × dεв/dt.
4. Статорные катушки коррекции гироскопа выполняют роль исполнительного элемента, создающего электромагнитный внешний момент ротора.